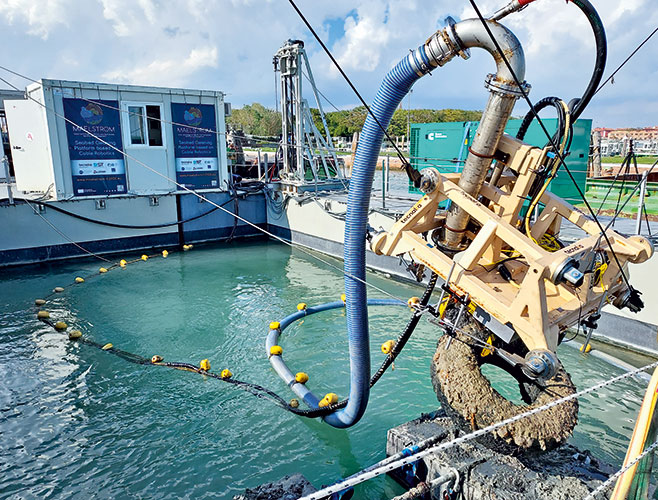
 Im Rahmen des Forschungsprojekts Maelstrom wurde ein Seilroboter entwickelt, der über Sauger kleine Partikel entfernen und per Greifer bis zu 130 kg schweren Abfall aus bis zu 20 m Tiefe bergen kann. © Pierre-Elie Herve/Tecnalia
Im Rahmen des Forschungsprojekts Maelstrom wurde ein Seilroboter entwickelt, der über Sauger kleine Partikel entfernen und per Greifer bis zu 130 kg schweren Abfall aus bis zu 20 m Tiefe bergen kann. © Pierre-Elie Herve/Tecnalia
Mehrere 10 Mio. Tonnen an Müll sinken auf den Grund der Meere oder zerfallen in Mikro- und Nanoplastik. Ein autonomer Roboter kann selektiv Objekte identifizieren und einsammeln.
Die Generalprobe hat das mit PC-based Control von Beckhoff automatisierte System bereits bestanden.
Wer verhindern will, dass Müll die empfindlichen Ökosysteme unter Wasser vergiftet oder Mikro- und Nanoplastik über die Nahrungsketten in unsere Körper gelangen, muss einerseits die weitere Verschmutzung der Gewässer verhindern und andererseits den bereits vorhandenen Müll einsammeln. Genau das hat das europäische Projekt Horizon 2020 – Maelstrom zum Ziel. Dazu hat ein internationales Forschungsteam, bestehend aus Tecnalia, Spanien, CNRS-Lirmm aus Frankreich und der italienischen Servizi Tecnici, die „Robotic Seabed Cleaning Plattform“ entwickelt.
Deren Kernkomponente ist ein Unterwasserroboter mit Greifer und Saugeinrichtung, der sich bis 20 m Tiefe flexibel bewegen kann. Über Sensoren und Kameras erkennt der Roboter den Müll auf dem Meeresboden, positioniert sich automatisch darüber und kann bis zu 130 kg schwere Gegenstände wie z. B. Fahrräder, Reifen, Kisten und Netze heben. Kleinere Teile oder im Wasser treibende Kunststoffe werden über einen Sauger geborgen.
„Da wir von der Oberfläche aus operieren und Greifer oder Sauger nur bei Bedarf aktivieren, erreichen wir eine hohe Selektivität und minimieren so die Auswirkungen auf das Ökosystem am Meeresboden“, erklärt Mariola Rodríguez, Maelstrom-Projektmanagerin bei Tecnalia. Die Generalprobe hat das System im September 2022 in den Kanälen Venedigs bestanden.
Die Positionierungswinden werden über Servoverstärker AX5118 und Servomotoren AM8071 von Beckhoff synchron angesteuert. „Um ein robustes, genaues und schnelles Positionieren zu gewährleisten, haben wir bürstenlose Synchron-Servomotoren gewählt“, betont Jose Gorrotxategi, Elektronikingenieur im Cable Robotics Team von Tecnalia.
Sensorik-Cluster über und unter Wasser
Für die Steuerung und Überwachung enthält der Rahmen des Unterwasserseilroboters eine Reihe von Sensoren und Kameras für den manuellen, automatischen und ferngesteuerten Betrieb. Die Kameras und Beleuchtungen ermöglichen eine manuelle Steuerung – vorausgesetzt, die Wassertrübung ist nicht zu hoch.
Interessante Stellen am Meeresboden kann der Bediener im Kamerabild anklicken, die der Roboter dann eigenständig anfährt. Ein Drucksensor am Robotergestell erfasst die Tauchtiefe, eine inertiale Messeinheit regelt dessen Lage im Wasser. Den Abstand der mobilen Plattform zum Meeresboden und ihre relative Geschwindigkeit dazu, erfasst ein Doppler Velocity Log über vier Sonarsensoren.
Auf dem Ponton an der Wasseroberfläche befinden sich weitere Sensoren, darunter ein Drucksensor zur Kompensation des atmosphärischen Drucks bei der Tiefensteuerung. Zwei Real-Time-Kinematic-GPS bestimmen in Echtzeit die Position und vertikale Ausrichtung des Lastkahns. Sämtliche Daten dieser unterschiedlichen Systeme fließen in die Steuerung und Positionsregelung des Roboters mit ein.
Neben der manuellen Bedienung kann das Gestell auch autonom Müll identifizieren, ansteuern und einsammeln. „Das funktioniert auf Basis künstlicher Intelligenz, die in der Lage ist, den Meeresmüll zu identifizieren und das am besten geeignete Entfernungsgerät auszuwählen“, präzisiert Herve.
Steuerung und Kommunikation
Die Steuerung des Unterwasserseilroboters mit seinen insgesamt zwölf Achsen − acht Winden und vier vertikal verfahrbare Schlitten an den Ponton-Masten − übernimmt TwinCAT 3 von Beckhoff, installiert auf einem Schaltschrank-Industrie-PC C6650. Dieser ist im Hauptschaltschrank installiert, der sich im Kontrollraum befindet. Für den sicheren Betrieb sorgen neben der Seitkraftüberwachung mehrere Not-Halt-Taster entlang der Anlage.
Die entsprechende Sicherheitslogik wird von einer EtherCat-Klemme EL6910 mit TwinSafe Logic ausgeführt. Die Servoantriebe mit integrierten Bremsen sind über TwinSafe-Drive-Optionskarten AX5805 in die Safety-Applikation eingebunden. Weitere vier Verteilerkästen, dezentral an den Seilwinden montiert, enthalten die I/O-Schnittstellenmodule sowie die Elektronik für die Seilkraftmessung. Die Verbindung zwischen Steuerschrank und Verteilerkästen erfolgt über EtherCat P.
Steuerung der Roboterplattform
Bei der Steuerung der Teleoperationen des Seilroboters per Joystick verwendet der Bediener die geschätzte Position der mobilen Unterwasserplattform sowie die auf der mobilen Plattform befindlichen Kameras. Über das HMI kann der Bediener die verschiedenen Steuerungsmodi anwählen und anhand der Sensorwerte alle Funktionen überwachen – zusätzlich zur visuellen Kontrolle per Unterwasserkameras.
Die für die Roboterplattform entwickelte Software berechnet in Echtzeit die geografische Position des Roboters dank Echtzeit-GPS und der Trägheitsmessgeräte. Außerdem wird die Position des Roboters auf der Karte des Meeresbodens angezeigt, auf der auch die Position der Abfälle eingezeichnet ist.
Der Roboter kann sich entweder im automatischen Modus bewegen, die Software bestimmt dann die „Flugbahn im Wasser“, oder im manuellen Modus per Joystick. Während der Bewegungen tastet eine Kamera in Kombination mit einem akustischen Sensor den Meeresboden ab, um die Tiefe (Bathymetrie) zu messen und den Müll zu erkennen. Diese Daten werden georeferenziert und in Echtzeit in der Karte eingeblendet. (BS)